Rysunek przedstawia dwa obrazy z szeroko oddzielonych kamer na autostradzie w Kalifornii.
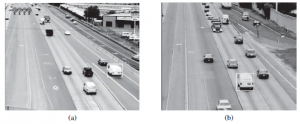
W tej aplikacji interesują nas dwa cele: oszacowanie czasu potrzebnego, przy aktualnych warunkach ruchu, na przejście z jednego miejsca do drugiego w systemie autostrad; oraz mierzenie popytu — to znaczy, ile pojazdów porusza się między dowolnymi dwoma punktami w systemie o określonych porach dnia iw określonych dniach tygodnia. Oba cele wymagają rozwiązania problemu powiązania danych na dużym obszarze z wieloma kamerami i dziesiątkami tysięcy pojazdów na godzinę. W przypadku nadzoru wizualnego fałszywe alarmy są powodowane przez poruszające się cienie, pojazdy przegubowe, odbicia w kałużach itp.; niepowodzenia wykrywania są spowodowane okluzją, mgłą, ciemnością i brakiem kontrastu wizualnego; a pojazdy stale wjeżdżają i wyjeżdżają z systemu autostrad w punktach, które mogą nie być monitorowane. Co więcej, wygląd dowolnego pojazdu może się radykalnie zmieniać między kamerami w zależności od warunków oświetleniowych i pozycji pojazdu na obrazie, a model przejścia zmienia się wraz z pojawianiem się i znikaniem korków. Wreszcie, w gęstym ruchu z szeroko oddzielonymi kamerami, błąd przewidywania w modelu przejściowym dla samochodu jadącego z jednej lokalizacji kamery do drugiej jest znacznie większy niż typowy odstęp między pojazdami. Pomimo tych problemów, nowoczesne algorytmy asocjacji danych odniosły sukces w szacowaniu parametrów ruchu w warunkach rzeczywistych. Asocjacja danych jest niezbędnym fundamentem śledzenia złożonego świata, ponieważ bez niego nie ma możliwości połączenia wielu obserwacji dowolnego obiektu. Kiedy obiekty na świecie wchodzą ze sobą w interakcje w złożonych działaniach, zrozumienie świata wymaga połączenia powiązania danych z relacyjnymi modelami prawdopodobieństwa otwartego wszechświata. Jest to obecnie aktywny obszar badań.