W tej sekcji rozszerzymy planowanie o obsługę środowisk częściowo obserwowalnych, niedeterministycznych i nieznanych. Podstawowe koncepcje odzwierciedlają te wcześniejsze, ale istnieją różnice wynikające z użycia reprezentacji podzielonych na czynniki, a nie reprezentacji atomowych. Wpływa to na sposób, w jaki reprezentujemy zdolność podmiotu do działania i obserwacji oraz na sposób, w jaki przedstawiamy stany przekonań — zestawy możliwych stanów fizycznych, w których może się znajdować podmiot — dla środowisk częściowo obserwowalnych. Możemy również skorzystać z wielu niezależnych od domeny metod do obliczania heurystyki wyszukiwania. Omówimy planowanie bezczujnikowe (znane również jako planowanie zgodne) dla środowisk bez obserwacji; planowanie awaryjne dla środowisk częściowo obserwowalnych i niedeterministycznych; oraz planowanie i ponowne planowanie online dla nieznanych środowisk. To pozwoli nam stawić czoła poważnym problemom w świecie rzeczywistym. Zastanów się nad tym problemem: mając krzesło i stół, celem jest ich dopasowanie – mają ten sam kolor. W stanie początkowym mamy dwie puszki z farbą, ale kolory farby i mebli są nieznane. Tylko tabela znajduje się początkowo w polu widzenia agenta:
![]()
Są dwie czynności: zdejmowanie wieczka z puszki z farbą i malowanie przedmiotu farbą z otwartej puszki.
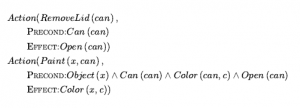
Schematy akcji są proste, z jednym wyjątkiem: warunki wstępne i efekty mogą teraz zawierać zmienne, które nie są częścią listy zmiennych akcji. Oznacza to, że Paint(x,can) nie wspomina o zmiennej c , reprezentującej kolor farby w puszce. W przypadku w pełni obserwowalnym jest to niedozwolone — musielibyśmy nazwać akcję Paint(x,can,c) . Ale w przypadku częściowo obserwowalnym możemy wiedzieć, jaki kolor jest w puszce lub nie. Aby rozwiązać częściowo obserwowalny problem, agent będzie musiał zastanowić się, jakie spostrzeżenia uzyska podczas wykonywania planu. Percept będzie dostarczany przez czujniki agenta, gdy faktycznie działa, ale gdy planuje, będzie potrzebował modelu swoich czujników. Wcześniej model ten został podany przez funkcję PERCEPT(s). Na potrzeby planowania rozszerzamy PDDL o nowy typ schematu, schemat percept:
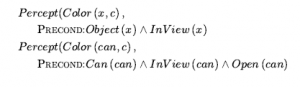
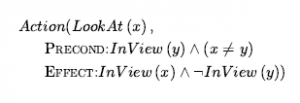
Pierwszy schemat mówi, że ilekroć obiekt jest w zasięgu wzroku, agent będzie postrzegał kolor tego obiektu (to znaczy, dla obiektu , agent pozna wartość logiczną Color(x,c) dla wszystkich c ). Drugi schemat mówi, że jeśli w zasięgu wzroku jest otwarta puszka, agent dostrzega kolor farby w puszce. Ponieważ na tym świecie nie ma żadnych zdarzeń egzogenicznych, kolor obiektu pozostanie taki sam, nawet jeśli nie jest postrzegany, dopóki agent nie wykona działania, aby zmienić kolor obiektu. Oczywiście agent będzie potrzebował akcji, która spowoduje, że obiekty (jeden na raz) pojawią się w polu widzenia:
W przypadku w pełni obserwowalnego środowiska mielibyśmy schemat Percept bez warunków wstępnych dla każdego biegłości. Z drugiej strony, agent bezczujnikowy w ogóle nie ma schematów Perceptu. Pamiętaj, że nawet środek bezczujnikowy może rozwiązać problem z malowaniem. Jednym z rozwiązań jest otwarcie dowolnej puszki z farbą i nałożenie jej zarówno na krzesło, jak i stół, zmuszając w ten sposób do tego samego koloru (nawet jeśli agent nie wie, jaki jest kolor). Agent planowania warunkowego z czujnikami może wygenerować lepszy plan. Najpierw spójrz na stół i krzesło, aby uzyskać ich kolory; jeśli są już takie same, plan jest gotowy. Jeśli nie, spójrz na puszki z farbą; jeśli farba w puszce jest tego samego koloru co jeden mebel, nałóż tę farbę na drugi mebel. W przeciwnym razie pomaluj oba kawałki dowolnym kolorem. Wreszcie, agent ds. planowania online może na początku wygenerować plan warunkowy z mniejszą liczbą oddziałów — być może ignorując możliwość, że żadna puszka nie pasuje do żadnego z mebli — i rozwiązać problemy, gdy się pojawią, zmieniając planowanie. Mógłby też poradzić sobie z niepoprawnością schematów działania. Podczas gdy planista warunkowy po prostu zakłada, że efekty działania zawsze się udają — że pomalowanie krzesła załatwia sprawę — agent zajmujący się przebudową sprawdzi wynik i sporządzi dodatkowy plan, aby naprawić każdą nieoczekiwaną awarię, taką jak niepomalowany obszar lub oryginalny kolor prześwitujące. W prawdziwym świecie agenci stosują kombinację podejść. Producenci samochodów sprzedają zapasowe opony i poduszki powietrzne, które są fizycznym ucieleśnieniem gałęzi planu awaryjnego, zaprojektowanych do radzenia sobie z przebiciami lub wypadkami. Z drugiej strony większość kierowców samochodów nigdy nie bierze pod uwagę tych możliwości; kiedy pojawia się problem, reagują jako agenci przebudowujący. Ogólnie rzecz biorąc, agenci planują tylko na nieprzewidziane okoliczności, które mają ważne konsekwencje i nie znikome prawdopodobieństwo wystąpienia. Tak więc kierowca samochodu, który planuje podróż przez Saharę, powinien przygotować wyraźne plany awaryjne na wypadek awarii, podczas gdy wyjazd do supermarketu wymaga mniej wcześniejszego planowania. Następnie przyjrzymy się każdemu z trzech podejść bardziej szczegółowo.