Centralnym składnikiem agenta opartego na wiedzy jest jego baza wiedzy (KB). Baza wiedzy to zbiór zdań. (Tutaj „zdanie” jest używane jako termin techniczny. Jest ono powiązane, ale nie identyczne ze zdaniami w języku angielskim i innych językach naturalnych.) Każde zdanie jest wyrażone w języku zwanym językiem reprezentacji wiedzy i reprezentuje pewne twierdzenie o świecie. Gdy zdanie przyjmuje się jako dane bez wyprowadzania z innych zdań, nazywamy je aksjomatem. Musi istnieć sposób na dodawanie nowych zdań do bazy wiedzy oraz sposób na zapytanie o to, co jest znane. Standardowe nazwy tych operacji to odpowiednio TELL i ASK. Obie operacje mogą obejmować wnioskowanie, czyli wyprowadzanie nowych zdań ze starych. Wnioskowanie musi być zgodne z wymogiem, że kiedy zadaje się pytanie dotyczące bazy wiedzy, odpowiedź powinna wynikać z tego, co zostało powiedziane (lub PRZEKAZANE) wcześniej bazie wiedzy. W dalszej części tego rozdziału dokładniej omówimy kluczowe słowo „podążać”. Na razie potraktuj to tak, że proces wnioskowania nie powinien zmyślać rzeczy w miarę postępu. Rysunek przedstawia zarys programu agenta opartego na wiedzy. Jak wszyscy nasi agenci, przyjmuje percept jako dane wejściowe i zwraca akcję. Agent utrzymuje bazę wiedzy KB, która początkowo może zawierać pewną wiedzę podstawową.
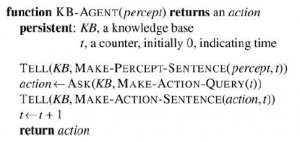
Za każdym razem, gdy program agenta jest wywoływany, robi trzy rzeczy. Po pierwsze, MÓWI bazie wiedzy, co postrzega. Po drugie, PYTA bazę wiedzy, jakie działania powinna wykonać. W procesie odpowiadania na to pytanie można przeprowadzić obszerne rozumowanie na temat aktualnego stanu świata, wyników możliwych sekwencji działań i tak dalej. Po trzecie, program agenta MÓWI bazie wiedzy, która akcja została wybrana i zwraca akcję, aby można ją było wykonać. Szczegóły języka reprezentacji są ukryte w trzech funkcjach, które implementują interfejs między czujnikami i elementami wykonawczymi z jednej strony a podstawowym systemem reprezentacji i rozumowania z drugiej. MAKE-PERCEPT-SENTENCE konstruuje zdanie stwierdzające, że podmiot postrzegał dany percept w określonym czasie. MAKE-ACTION-QUERY konstruuje zdanie, które pyta, jakie działanie należy wykonać w danym momencie. Na koniec MAKE-ACTIONSENTENCE konstruuje zdanie stwierdzające, że wybrane działanie zostało wykonane. Szczegóły mechanizmów wnioskowania są ukryte wewnątrz TELL i ASK. Późniejsze sekcje ujawnią te szczegóły. Agent na rysunku 7.1 wygląda dość podobnie do agentów ze stanem wewnętrznym opisanych w rozdziale 2 . Jednak ze względu na definicje TELL i ASK agent oparty na wiedzy nie jest arbitralnym programem do obliczania działań. Można go opisać na poziomie wiedzy, gdzie wystarczy określić tylko to, co agent wie i jakie są jego cele, aby określić jego zachowanie. Na przykład zautomatyzowana taksówka może mieć na celu przewiezienie pasażera z San Francisco do hrabstwa Marin i może wiedzieć, że most Golden Gate jest jedynym połączeniem między tymi dwiema lokalizacjami. Wtedy możemy się spodziewać, że przekroczy most Golden Gate, ponieważ wie, że to osiągnie swój cel. Zauważ, że ta analiza jest niezależna od sposobu działania taksówki na poziomie wdrożenia. Nie ma znaczenia, czy jego wiedza geograficzna jest zaimplementowana jako połączone listy lub mapy pikseli, czy też rozumuje, manipulując ciągami symboli przechowywanymi w rejestrach, czy też propagując zaszumione sygnały w sieci neuronów. Agenta opartego na wiedzy można zbudować po prostu, przekazując mu to, co musi wiedzieć. Zaczynając od pustej bazy wiedzy, projektant agenta może MÓWIĆ zdania jeden po drugim, dopóki agent nie będzie wiedział, jak działać w swoim środowisku. Nazywa się to deklaratywnym podejściem do budowania systemu. Natomiast podejście proceduralne koduje pożądane zachowania bezpośrednio jako kod programu. W latach 70. i 80. zwolennicy obu podejść toczyli gorące debaty. Rozumiemy teraz, że skuteczny agent często łączy w swoim projekcie zarówno elementy deklaratywne, jak i proceduralne, a wiedzę deklaratywną można często skompilować w bardziej wydajny kod proceduralny. Możemy również dostarczyć agentowi opartemu na wiedzy mechanizmy, które pozwolą mu uczyć się samodzielnie. Agent uczący się może być w pełni autonomiczny.