Rozważmy śliski świat próżni, który jest identyczny ze zwykłym (niezmiennym) światem próżni, z tą różnicą, że ruchy czasami kończą się niepowodzeniem, pozostawiając agenta w tym samym miejscu. Na przykład przesunięcie w prawo w stanie 1 prowadzi do stanu przekonań {1,2}. Rysunek przedstawia część wykresu wyszukiwania; widać, że nie ma już acyklicznych rozwiązań ze stanu 1, a ANDORSEARCH wróci z porażką.
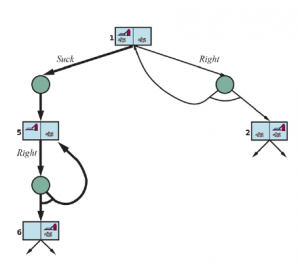
Istnieje jednak cykliczne rozwiązanie, które polega na próbowaniu Prawidłowo, dopóki nie zadziała. Możemy to wyrazić za pomocą nowej konstrukcji while:
[Suck,while State = 5 do Right, Suck]
lub dodając etykietę oznaczającą część planu i odnosząc się do tej etykiety później:
[Suck,L1 : Right, if State = 5 then L1 else Suck]
Kiedy plan cykliczny jest rozwiązaniem? Minimalnym warunkiem jest to, że każdy liść jest stanem docelowym i że liść jest osiągalny z każdego punktu planu. Oprócz tego musimy rozważyć przyczynę niedeterminizmu. Jeśli rzeczywiście jest tak, że mechanizm napędowy robota próżniowego przez jakiś czas działa, ale w innych przypadkach ślizga się losowo i niezależnie, to agent może być pewien, że jeśli czynność zostanie powtórzona wystarczająco dużo razy, w końcu zadziała i plan zadziała. odnieść sukces. Ale jeśli niedeterminizm jest spowodowany jakimś niezauważonym faktem dotyczącym robota lub środowiska — na przykład pękł pasek napędowy i robot nigdy się nie poruszy — to powtórzenie czynności nie pomoże. Jednym ze sposobów zrozumienia tej decyzji jest stwierdzenie, że początkowe sformułowanie problemu (w pełni obserwowalne, niedeterministyczne) jest porzucane na rzecz innego sformułowania (częściowo obserwowalnego, deterministycznego), w którym niepowodzenie planu cyklicznego przypisuje się nieobserwowanej właściwości popędu pasek.